

下肢主被动训练康复机器人
发布日期:2022年06月30日 09:50 作者: 科研与社会服务处 浏览数: 分享到:
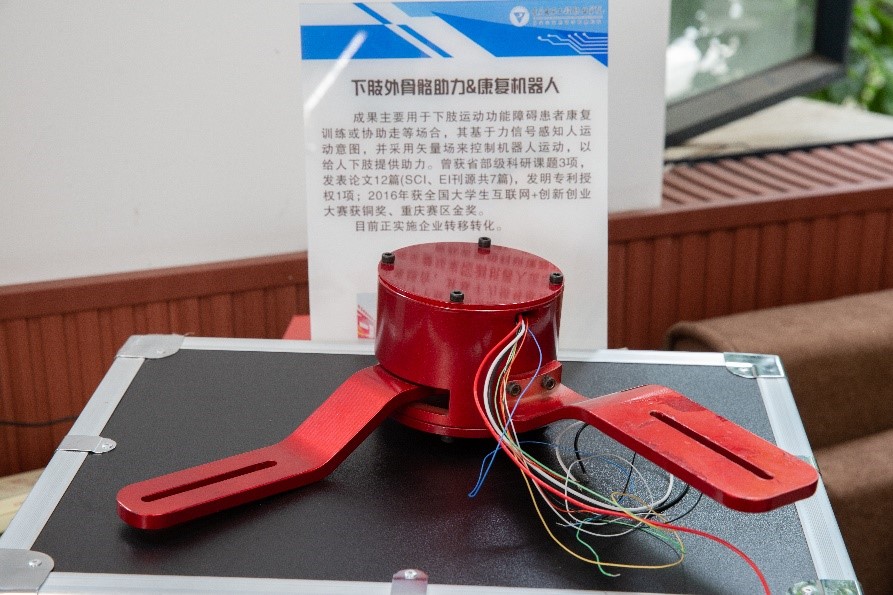
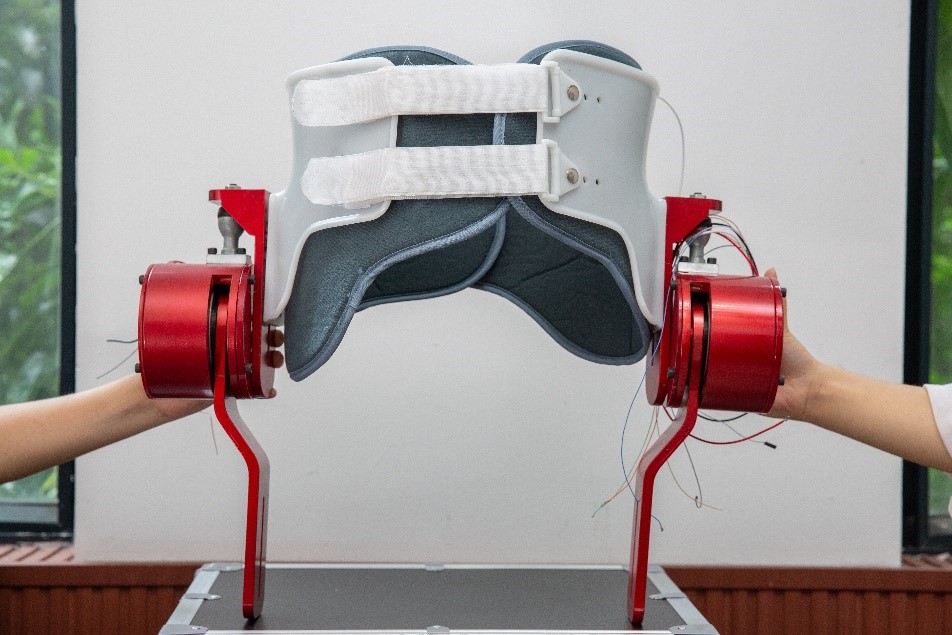
面向因脑卒中而引起运动功能障碍用户(患者)的PT、OT等康复治疗需求,团队开发了下肢主被动训练康复机器人。这些不仅能够对因脑卒中而引起的运动障碍患者进行康复治疗,还能在孤独老人陪护、推迟老年痴呆症的发生等方面发挥独特的作用,为相关用户(患者)恢复运动功能提供一类有效解决方案。
其控制方法主要由康复机器人本体、运动意图识别系统、吸引子多项式近似算法、PD控制器、力传感器及陀螺仪等组成。其中,根据大脑信息处理机制而构建的吸引子多项式近似算法是关键,其需具备输入输出同步特性,以用于起立、下蹲、行走等主动训练模式。
目前该康复机器人技术体系已基本形成(机械、控制)。围绕该类机器人主持了重庆市自然科学基金等省部级相关科研课题4项,在自动化学报、控制理论及应用、机器人等权威期刊上发表对应论文15篇(SCI、EI刊源共7篇);授权发明专利1项,正申请1项;试制下肢外骨骼康复机器人样机1套,学生参加互联网+创新创业大赛曾获重庆市金奖及全国铜奖。该成果已转移转化,专利转让费60万元,正实施推广应用。
【关闭】
 重电在线
重电在线 智慧校园
智慧校园